Dithering en traitement du signal : application avec un gyrocompas MEMS
Cet article explore l'utilisation du dithering dans le traitement du signal pour effectuer une mesure avec une précision bien en deçà de la LSB des capteurs que j'utilise. Cela m'a permis de mesurer le taux de rotation de la Terre à l'aide de gyroscopes MEMS Bosch BMI160. Cette mesure a été rendue possible en combinant de nombreuses mesures, la rotation motorisée des capteurs et l'application d'un filtre de Kalman. En utilisant ces résultats, nous avons développé un gyrocompas MEMS innovant. Ce dispositif permet d'obtenir des mesures précises et fiables de la position du nord géographique et de la latitude, et se distingue par l'absence de pièces mobiles, contrairement aux gyrocompas classiques. Découvrez également mon portfolio, où vous trouverez une présentation détaillée de ce projet ainsi que d'autres réalisations en systèmes embarqués et en traitement du signal. Vous y trouverez des photos, des schémas techniques et des vidéos montrant le fonctionnement du gyrocompas MEMS ainsi que d'autres innovations développées.
Bertrand Selva
11/15/20246 min read

Introduction au Dithering dans le Traitement du Signal
Le dithering est une technique de traitement du signal qui consiste à ajouter un bruit contrôlé à un signal numérique avant sa quantification. Cette méthode permet de réduire les erreurs de quantification et d'améliorer la précision des mesures, en particulier lorsque l’on travaille avec des signaux à faible amplitude ou des résolutions limitées. Un résultat marquant du dithering est la réduction de la variance des erreurs de mesure en fonction de l’inverse de la racine carrée du nombre de mesures n, soit
Cette propriété statistique est particulièrement utile lorsqu’il est possible d’effectuer un grand nombre de mesures, permettant ainsi de diminuer le bruit de fond et d’augmenter la fiabilité des résultats. Dans la suite, je donnerai des exemples de systèmes utilisant une paire de gyroscopes MEMS Bosch : le BMI160. Ils m’ont permis de mesurer une grandeur aussi ténue que le taux de rotation de la Terre (soit environ 0,00416°/s). J’ai ensuite mis à profit la possibilité d’opérer cette mesure en proposant un dispositif innovant : un gyrocompas MEMS !
Exploitation de Grandes Quantités de Mesures pour Réduire le Bruit
Le dithering est une technique de traitement du signal qui consiste à ajouter un bruit contrôlé à un signal numérique avant sa quantification. Cette méthode permet de réduire les erreurs de quantification et d'améliorer la précision des mesures, en particulier lorsque l’on travaille avec des signaux à faible amplitude ou des résolutions limitées. Un résultat marquant du dithering est la réduction de la variance des erreurs de mesure en fonction de l’inverse de la racine carrée du nombre de mesures n.
C’est une méthode particulièrement adaptée pour les systèmes embarqués modernes où il est possible de contrôler l’acquisition et de traiter un grand nombre de données in situ et rapidement. Cependant, une approche statistique aussi simple présente un gros problème : bien qu'elle soit efficace pour se débarrasser d’un bruit gaussien centré, elle est inefficace pour la suppression du biais de mesure des capteurs.
Heureusement, il existe une astuce permettant de surmonter ce problème…
Gestion originale des biais de mesures
En réalité, j’ai utilisé deux astuces pour m’affranchir des biais individuels des capteurs et permettre une détermination très précise de la valeur mesurée :
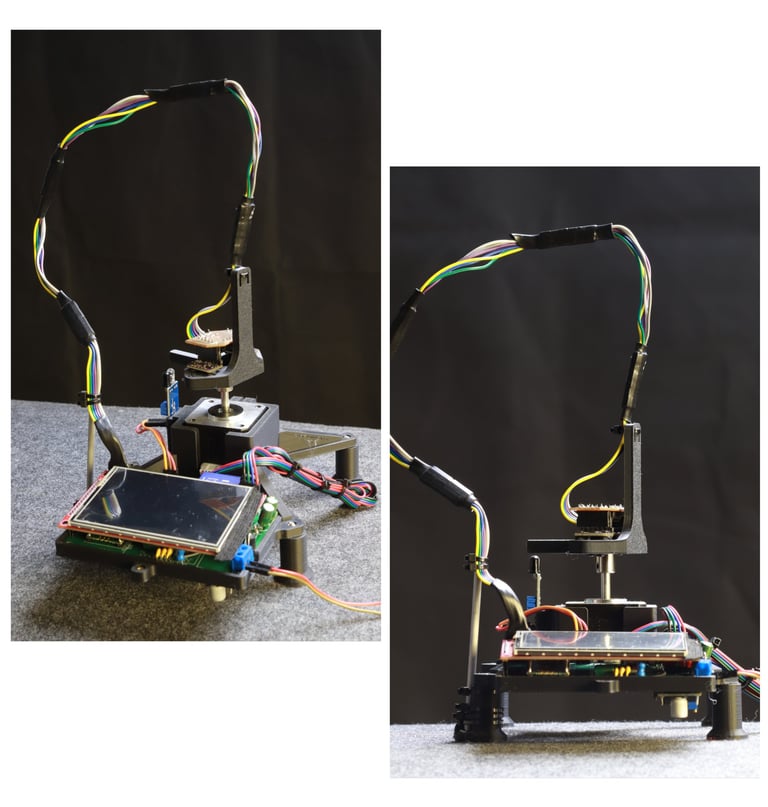
1. Utilisation de Plusieurs Capteurs : Dans notre dispositif, nous avons intégré deux gyroscopes MEMS BMI160. En comparant les valeurs des mêmes grandeurs mesurées par chaque capteur, suivant la même orientation, il est possible d’obtenir des informations sur les biais individuels des capteurs.
2. Rotation des Capteurs lors des Mesures : En faisant tourner les capteurs lors des mesures à l’aide d’une tourelle motorisée, nous pouvons compenser les biais de manière efficace. En effet, cette rotation permet de mesurer le signal dans des directions opposées : dans un sens, nous obtenons biais + signal et dans l’autre sens biais - signal . Cette technique permet d’annuler les biais systématiques en combinant les mesures des deux orientations.
Fusion des Mesures avec un Filtre de Kalman
Pour exploiter pleinement les données issues de plusieurs capteurs et positions, nous utilisons un filtre de Kalman. Cet algorithme de filtrage permet de fusionner les informations provenant de tous les capteurs tout en estimant les biais et les variations dues à des facteurs externes tels que la température et l'accélération de la pesanteur terrestre (pour la mesure du taux de rotation de la terre, pour le gyrocompas les mesures se font dans le plan horizontal). Le vecteur d’estimation d’état du filtre de Kalman inclut non seulement la valeur du taux de rotation de la Terre que nous souhaitons mesurer, mais également les biais des capteurs et leurs dépendances aux conditions environnementales. Cette approche permet d’obtenir une estimation robuste et précise du signal réel en minimisant l’impact des bruits et des biais systématiques.
Mise en Œuvre : Mesure du Taux de Rotation de la Terre
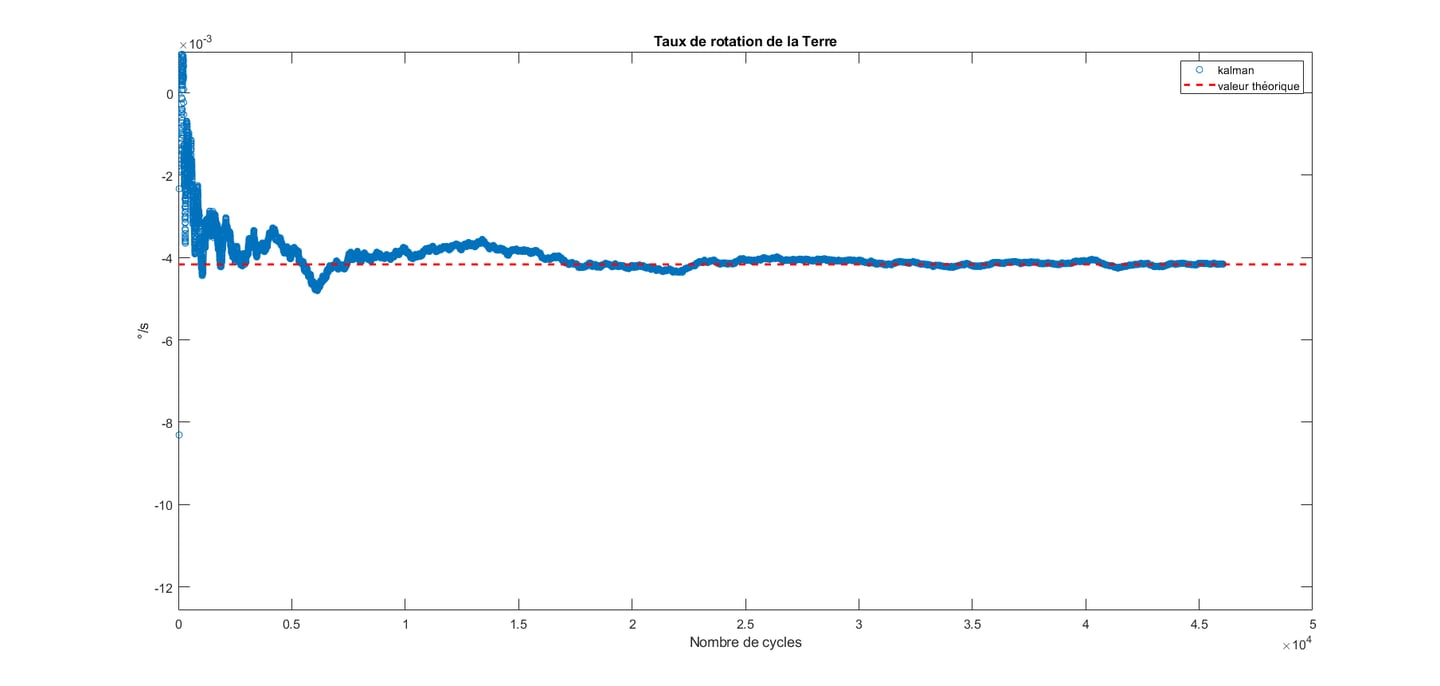
Nous avons mis en œuvre cette technique en fusionnant des dizaines de milliers de mesures issues de deux gyroscopes MEMS BMI160 pour mesurer le taux de rotation de la Terre, qui est de l’ordre de grandeur du LSB du capteur, soit environ 0,00416°/s. Grâce au dithering naturel des capteurs MEMS et à l’application du filtre de Kalman, nous avons pu améliorer significativement la résolution effective des mesures. Le bruit aléatoire présent dans le système permet, après moyennage et filtrage, de détecter des variations plus fines que la limite du LSB du capteur. Ce projet démontre qu’il est possible, avec des composants peu coûteux et facilement accessibles, de réaliser des mesures très précises, bien plus précises que ce que permettraient les capteurs sans recours à une approche statistique.
Le revers de la médaille est la nécessité de mesurer des phénomènes dont la constante de temps pour la variation est très grande par rapport au temps d’acquisition. C’est le cas pour la Terre : elle tourne à une vitesse quasi constante depuis quelques centaines de millions d’années.
Vous trouverez des détails sur la composition du système et l'implémentation du filtre de kalman ici : https://selvasystems.net/systemes-embarques-et-traitement-du-signal

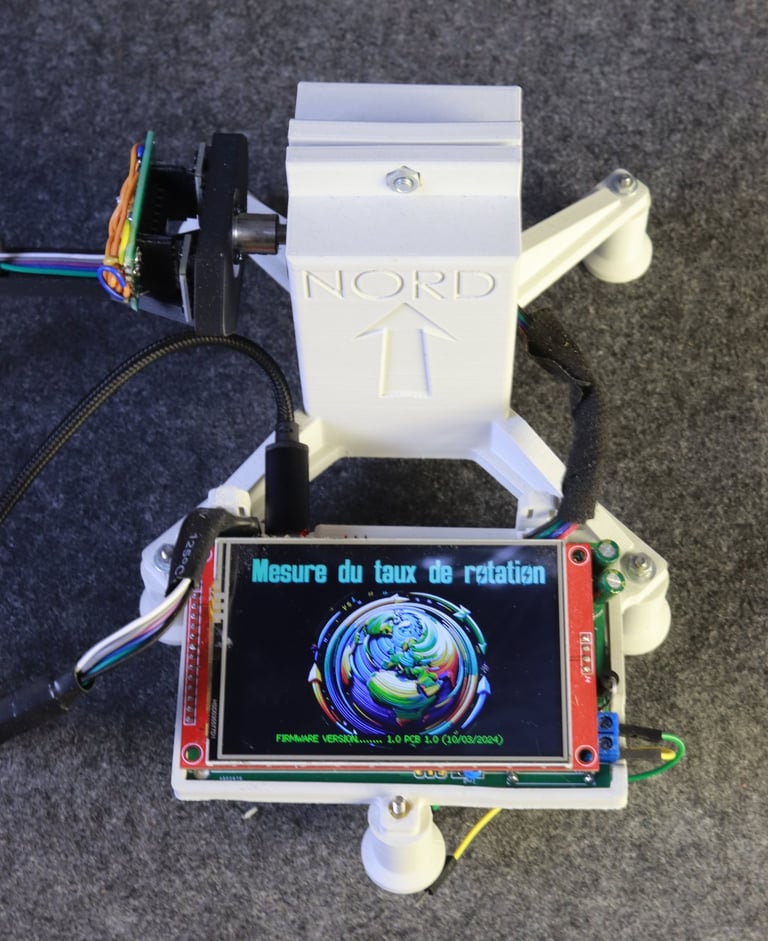
Gyrocompas MEMS
Le gyrocompas MEMS de déterminer le nord géographique et la latitude avec une précision de l’ordre du degré, sans recourir à la mesure du champ magnétique terrestre ! En fait, le même principe de mesure que pour le taux de rotation de la Terre est utilisé, mais l’opération est effectuée dans le plan horizontal (orienté de π/2−latitude par rapport à l’axe de rotation de la Terre). On relève la projection du taux de rotation de la Terre suivant cinq positions angulaires dans ce plan. Je fais ensuite un ajustement harmonique de la rotation de la Terre projetée sur le plan horizontal. Le paramètre de déphasage ainsi identifié dans cette fonction harmonique donne le décalage angulaire entre la position du nord géographique et le référentiel de la machine. Un écran LCD permet d’afficher l’estimation comme une boussole à chaque acquisition.
La vidéo ci-dessous montre la rapidité d’acquisition des données : dès les premiers cycles, une estimation raisonnable de la position du nord est obtenue. Si l’on laisse la machine fonctionner pendant plusieurs heures, le filtre de Kalman converge vers la valeur cible avec une précision de l’ordre du degré pour la latitude et l’azimut.
Vous trouverez des détails sur le gyrocompas ici : https://selvasystems.net/innovations


Conclusion
L’intégration du dithering naturel des gyroscopes MEMS et l’utilisation d’un filtre de Kalman pour la fusion des données ont permis de surmonter les limitations inhérentes des capteurs MEMS de faible résolution et bon marché que j'ai utilisé. Cette technique peut être employée à une grande variété de capteurs dès lors que la grandeur mesurée ne varie pas au cours du cycle d’acquisition, qui peut être assez long en raison du très grand nombre de mesures nécessaires.
Ce projet innovant démontre qu’il est possible de mettre en œuvre une mesure effective du taux de rotation de la Terre, en utilisant des composants accessibles et abordables. Elle est rendue possible par la synchronisation du déplacement des capteurs et de leur utilisation, ainsi que par le recours à un filtre de Kalman alimenté par les données des capteurs, leur position, leur température et implémenté directement dans le microcontrôleur. Cela permet d’avoir une lecture de l’estimation des valeurs mesurées en temps réel, avec un affichage direct du résultat. Tout est géré au sein du système embarqué (interface utilisateur, acquisition, gestion du moteur, implémentation du filtre, etc), rendant ce dispositif compact, transportable, peu énergivore, économique, robuste, facile à fabriquer...
Mots-clés : Systèmes embarqués, gyroscope, BMI160, MEMS, Pi Pico, taux de rotation de la Terre, filtre de Kalman, platisme, moteur pas à pas, traitement du signal, mesure expérimentale, interface utilisateur, scepticisme scientifique, confirmation expérimentale.
Innovation
Systèmes embarqués, intelligence artificielle, deep learning, solutions sur mesure, efficacité, innovation, sécurité, fiabilité.
Contact
© 2025. All rights reserved.
© 2025. Tous droits réservés.