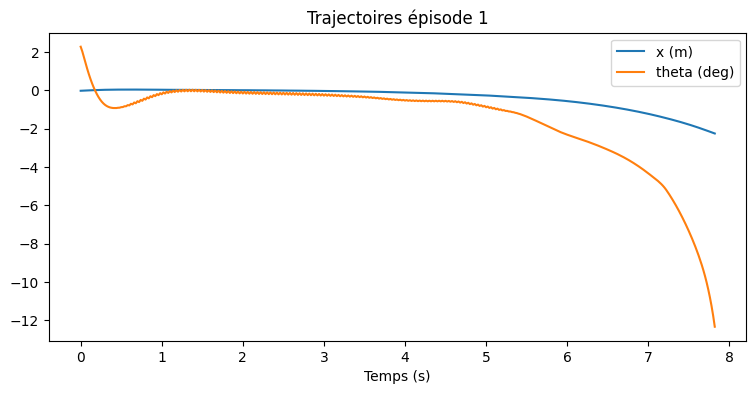
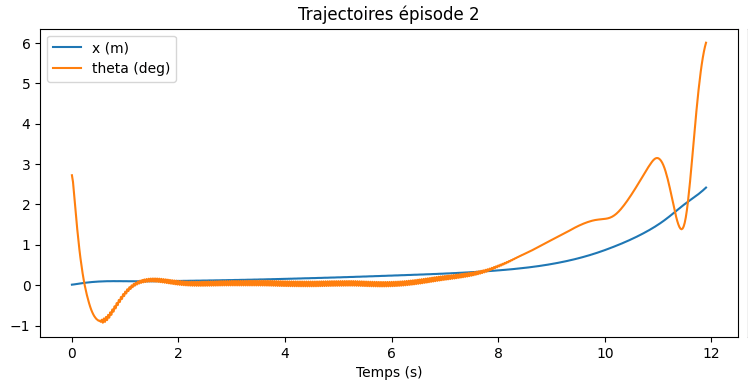
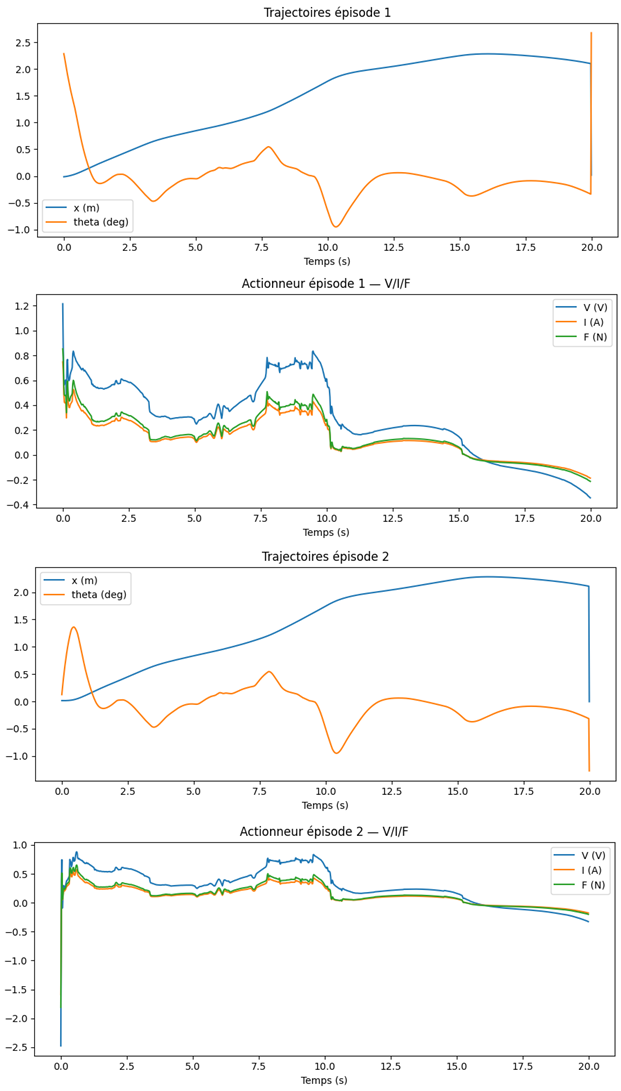
Asservissement d'un pendule inversé par Renforcement Learning (méthode SAC)
Ce projet illustre comment stabiliser un pendule inversé via une commande réaliste simulée, intégrant un moteur à courant continu modélisant les effets électriques et mécaniques (R–L, fcem, saturation, frottements). Le tout est maîtrisé par un agent entraîné avec l’algorithme Soft Actor-Critic (SAC), grâce à la bibliothèque Stable-Baselines3. Dépôt GitHub : https://github.com/Bertrand-selvasystems/pendule_inverse_RL_SAC
Bertrand Selva
8/24/20251 min read

Innovation
Systèmes embarqués, intelligence artificielle, deep learning, solutions sur mesure, efficacité, innovation, sécurité, fiabilité.
Contact
© 2025. All rights reserved.
© 2025. Tous droits réservés.