Analyse modale avec des systèmes embarqués low cost
Dans ce billet, je vous propose une petite expérience d’analyse modale sur une poutre modèle, réalisée avec des moyens minimalistes : des capteurs accélérométriques MEMS low cost, des microcontrôleurs ESP32 synchronisés par Wi-Fi. Une manip simple, pensée sans moyens expérimentaux dédiés, mais qui révèle une belle richesse dans les données, avec une capture claire des premiers modes propres de la poutre. Et surtout qui lève un verrou technologique : la synchronisation fine des points de mesure par radio.
Bertrand Selva
4/4/202511 min read
Dans cet article, je vous propose une petite expérience d’analyse modale sur une poutre modèle, réalisée avec des moyens minimalistes : des capteurs accélérométriques MEMS low cost, des microcontrôleurs ESP32 synchronisés par Wi-Fi. Une manip simple, pensée sans moyens expérimentaux dédiés, mais qui révèle une belle richesse dans les données, avec une capture claire des premiers modes propres de la poutre.
Dans un article précédent (https://selvasystems.net/la-synchronisation-de-plusieurs-systemes-embarques), je présentais un protocole de synchronisation « maison » entre plusieurs ESP32, capable de maîtriser l’offset temporel entre boîtiers avec un écart type de l’ordre de 10 microsecondes. Ce n’était pas qu’un exercice de style : cette synchronisation fine est au cœur d’une preuve de concept visant à démontrer qu’on peut faire de l’analyse modale avec des boîtiers radio-synchronisés — sans recourir à du matériel lourd ou à une synchronisation filaire (la plupart des solutions commerciales fonctionnent pourtant aujourd'hui avec des câbles pour la synchronisation).
Ce que je vous présente ici, ce sont les tous premiers résultats concluants d’une mesure vibratoire sans fil, avec un matériel low cost « grand public », qui à la base, n’est pas du tout pensé pour ce genre d’applications.
La problématique de la synchronisation
Ce n’est pas trivial, pour plusieurs raisons. D’abord, il faut pouvoir réactualiser régulièrement l’acquisition de l’offset de chaque boîtier, car à ces constantes de temps, la dérive des oscillateurs internes des microcontrôleurs devient significative. On parle d’une dérive typique de ±20 ppm, soit ±20 microsecondes par seconde. C’est suffisant pour dégrader sérieusement la cohérence des mesures si on ne corrige pas suffisamment régulièrement.
L’autre défi, c’est de réussir à maintenir cette synchronisation tout en continuant l’acquisition des signaux, sans que les deux tâches ne se gênent mutuellement dans le microcontrôleur. On cherche un équilibre fin entre précision temporelle et continuité d’enregistrement.
Et il faut être précis. Prenons un exemple simple : imaginez que vous souhaitez analyser le comportement vibratoire d’une structure, avec des capteurs accélérométriques échantillonnés à 1000 Hz (donc pour une structure vibrant à quelques centaines de Hz), en quatre points distincts. Pour capturer correctement les modes propres, il faut que les acquisitions soient rigoureusement synchronisées. À 1000 Hz, une période dure 1 milliseconde. Cela signifie qu’un décalage de quelques degrés en phase correspond à un décalage temporel de l’ordre de 10 microsecondes. Si vous dépassez ce seuil, le dépouillement modal perd en précision.
Ici la contrainte est un peu moins sévère. Nous étudions une poutre modèle dont les cinq premiers modes propres se situent en dessous de 50 Hz. Notre précision de synchronisation est donc largement suffisante pour notre application…
Concrètement, notre solution fonctionne avec un maitre, sorte de chef d’orchestre, et de plusieurs esclaves. Le maitre n’a pas pour fonction de travailler bien entendu : il n’opère aucune mesure. Il permet de déterminer l’offset et le drift pour chacun des esclaves.
On a recours à une approche statistique pour renforcer ces données. On utilise un filtre de Kalman.
Nos résultats montrent que le filtre converge très vite (de l’ordre de la vingtaine de seconde avec 4 boitiers esclaves) s’il est correctement initialisé.
Autre point : le temps d’acquisition de l’offset est largement plus court que le temps caractéristique de variation du drift. Ce qui est super. Bien entendu, plus on rajoute de boitiers à synchroniser, moins cela reste vrai. Notre système serait compatible avec la synchronisation fine d'au moins une trentaine de boitier avant de dégrader significativement la maitrise de l’offset (mais il y a plusieurs stratégies possibles pour améliorer cela).
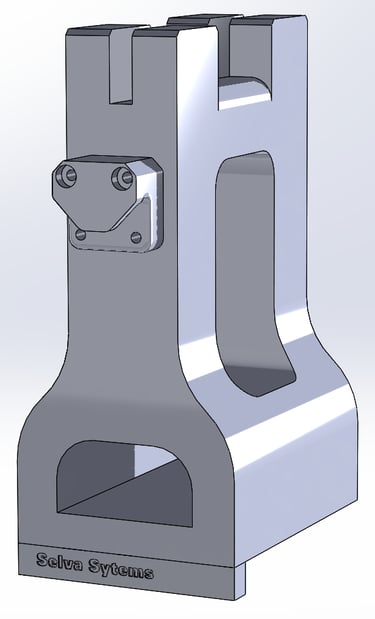
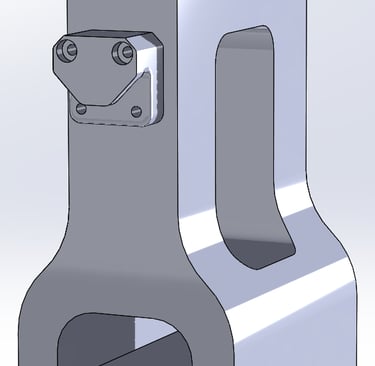
La poutre modèle
Faute de mieux les montants sont réalisés en PLA presque plein. La poutre est pincée entre deux tubes en acier de 8mm dans la partie supérieure du montant. Le tout est maintenue par des gros élastiques. C'est une bonne manière de bloquer les mobilités à part la translation dans la direction de l'axe de la poutre et la rotation. Des appuis glissants comme on dit en résistance des matériaux...


Pour l’excitation, je fais un lâchée avec une déformation imposée de 1 cm à la poutre. Je me mets à une position qui ne correspond pas à un ventre, pour aucun des premiers modes. Concrètement, j’impose la déformation au 7/24 de la poutre....
La poutre mesure 2.55m, 6mm de hauteur et 40 mm de large. Les appuis sont distants de 2m. Le système est symétrique. Les capteurs prennent placent à l/4, l/3, 2l/3 et 3l/4.
Le dépouillement des résultats expérimentaux
Synchronisation des mesures
Je fais une bonne part du post-traitement sur maltab/octave. Ce qui simplifie la vie coté embarqué.
Il y a plusieurs traitements préliminaires sur les signaux acquis pour chaque esclave afin de réduire la bande passante du capteur et de réduire le bruit.
Ensuite, on exploite les données issues du maitre pour « projeter » les données de tous les esclaves dans la base de temps du maitre par interpolation.
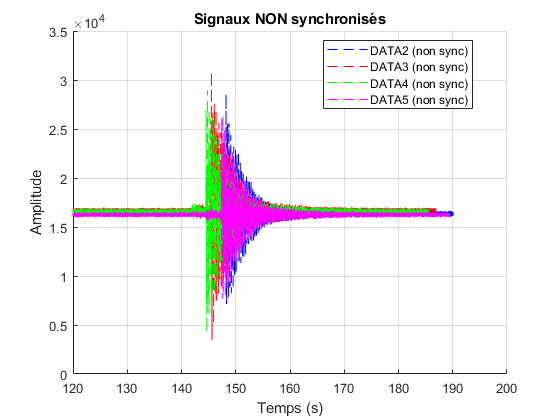
Pour illustrer ce processus (sur ces images les traitements du bruit n’est pas encore présents), le premier graphique représente les signaux temporels des 4 capteurs représentés à partir de leur temps machine respectif.

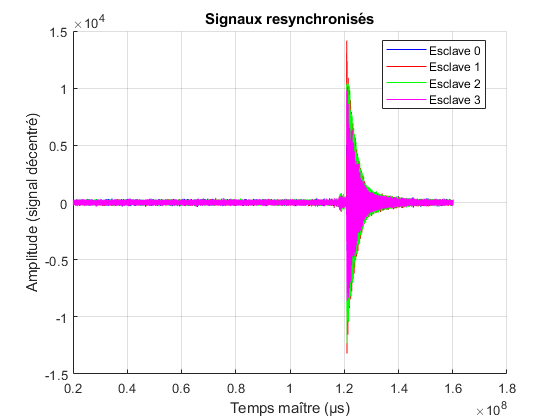
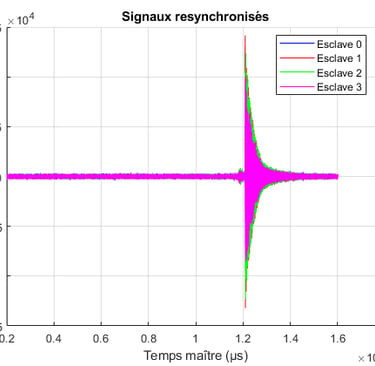
Comme en témoigne le second graphique, qui représente les mêmes signaux recentrés autour de leur moyenne et resynchronisés, notre méthode de synchronisation par radio marche très bien...
Répartition de puissance spectrale
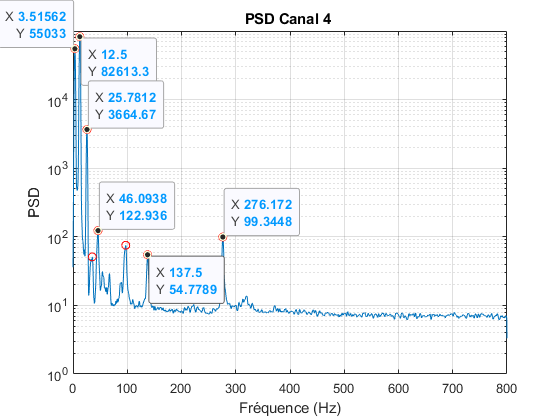
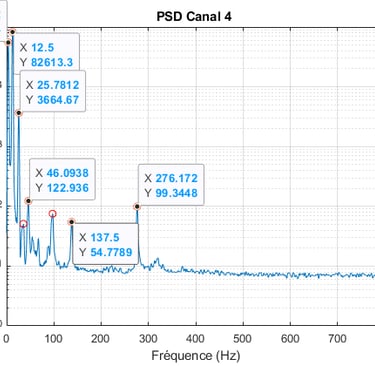
Une étape préliminaire avant de les injecter dans l’ADE pour l’analyse modale proprement dite est de déterminer les fréquences propres. Sous matlab/octave, j’ai calculé la densité spectrale de puissance (PSD) pour chacun des points de mesure. Le principe est simple : découpage en fenêtres temporelles, transformée de Fourier sur chaque segment, puis moyenne des spectres pour lisser le résultat. Ce traitement donne une première signature fréquentielle des modes, qui permet de valider la qualité des signaux avant toute exploitation plus poussée : il faut voir les fréquences propres de la poutre...
Et là, les mesures sont très exploitables comme visible sur le PSD suivant.


Comparaison avec calcul éléments finis
Et cerise sur le gâteau : ça colle très bien avec la petite simulation éléments finis réalisée. J’ai à peine eu besoin de retoucher les paramètres d’entrée dans mon modèle.
Dans le cas d’une poutre en deux appuis, symétrique, le comportement vibratoire est assez facile à prédire à la main — je le fais d’ailleurs avec mes étudiants.
Les fréquences propres suivent globalement la relation, avec n l'indice du mode et f0 la fréquence fondamentale :
Méthode temporelle d'extraction des modes propres
Forcément, avec seulement quatre points de mesure fixes, ce n’est pas fou fou… On ne peut pas espérer une cartographie complète ni une animation précise de la déformée modale. Mais il n’en reste pas moins que les premiers modes apparaissent clairement. Et pour une manip aussi minimaliste dans ses moyens, c’est une belle réussite.
Voici donc les résultats pour les premiers modes, en lien avec les résultats et analyses présentés plus haut :
L’analyse modale a été réalisée à l’aide de l’ADE (Analyse de Décomposition en Espaces), une méthode d’identification temporelle. Le principe est de considérer les signaux comme la réponse libre (ou pseudo-libre) d’un système linéaire, et l’ADE extrait les modes propres (fréquences, amortissements, formes modales) à partir de la dynamique observée.
Techniquement, la méthode repose sur la construction d’une matrice de Hankel à partir des signaux, suivie d’une décomposition en sous-espaces. Elle est particulièrement adaptée à ce genre de manip ou au SHM (Structural Health Monitoring) en général, puisqu’elle fonctionne sans connaissance préalable du signal d’excitation. Elle permet d’identifier les modes dominants, même dans des conditions expérimentales peu contrôlées, ou lorsque la structure est soumise à son excitation naturelle. Par exemple, dans notre cas (on ne contrôle pas l'excitation). Ou dans le cas d’un pont, où les sources d’excitation peuvent être les rafales de vent, les voitures, les camions, les piétons marchant au pas militaire, etc…
Perspective d’amélioration
Il y a plusieurs pistes d’amélioration et de test à explorer. Notamment, il serait pertinent de :
Conduire une série d’essais répétés, pour renforcer les résultats via la superposition et l’analyse statistique.
Faire varier les conditions d’appui de la poutre, pour observer les effets sur les fréquences propres et la distribution spectrale. On pourrait essayer un appui au milieu par exemple.
Concevoir un boîtier étanche, puis en fabriquer une vingtaine pour les coller sur un vrai pont… (c'est la finalité)
Tester la robustesse de la synchronisation non pas durant quelques heures de manip comme ici mais durant quelques jours.
Intégrer une couche réseau dans le logiciel embarqué, capable de gérer les interruptions de signal, les pannes, et d'assurer une communication résiliente entre les boîtiers en cas de défaillance d'un des boitiers.
Je suis vraiment enthousiaste à propos de cette manip. J’aime l’idée, inspirée du low-tech, de faire beaucoup avec peu, et ici, c’est exactement ce qu’on a fait. Ce projet constitue une preuve de concept pour l’expérimentation vibratoire sans fil, pensée pour l’analyse modale, avec une synchronisation radio et aucun câble à tirer, des boitiers de mesure avec un coût de revient extrêmement faible.
Dans une prochaine série d’articles, je reviendrai plus en détail sur le fonctionnement de la méthode ADE, et je partagerai d’autres résultats expérimentaux. Nous tenterons également d’identifier par Deep Learning la position de lâchée de la poutre, à partir des données d’accélérométrie collectées (si j'arrive à collecter assez de données).
L’objectif suivant est de trouver un véritable ouvrage à instrumenter, pour passer à l’échelle et voir si ça fonctionne en situation réelle...
Mais ici, le cas est un peu différent : on n’a plus affaire à une poutre de masse linéique constante.
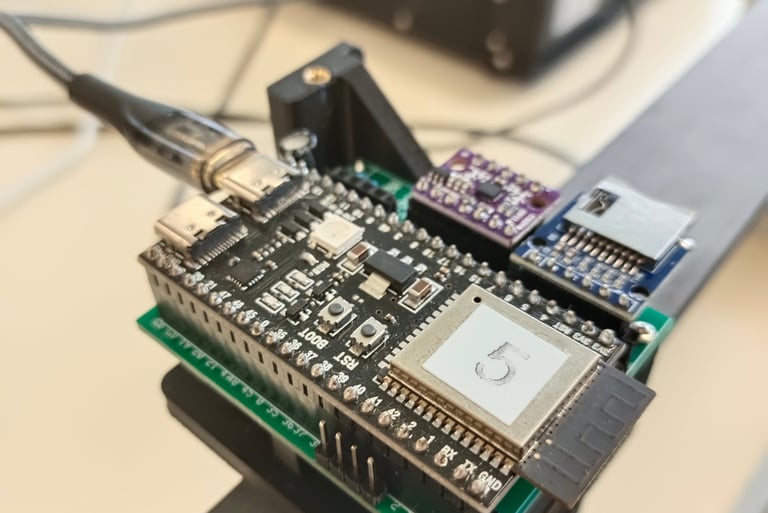
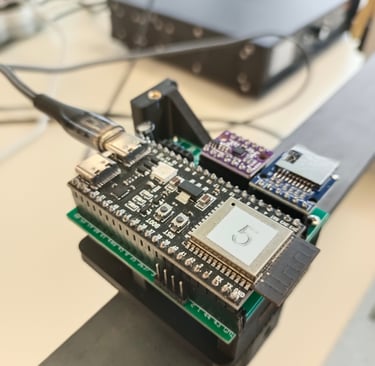
En effet, chaque capteur — avec sa bride imprimée en PLA, sa platine support, le PCB et les composants — pèse environ 79 g. La poutre, elle, fait dans les 2 kg, et porte 4 capteurs. Ces masses ont une influence non négligeable sur les modes vibratoires. Il a donc fallu les modéliser dans l'étude éléments finis comme des masses ponctuelles.
En réalité, pour les modes les plus bas, leur influence reste limitée, et les résultats restent très proches de l’analytique. En revanche, pour les fréquences plus élevées, l’écart devient plus marqué, ce qui est tout à fait attendu.
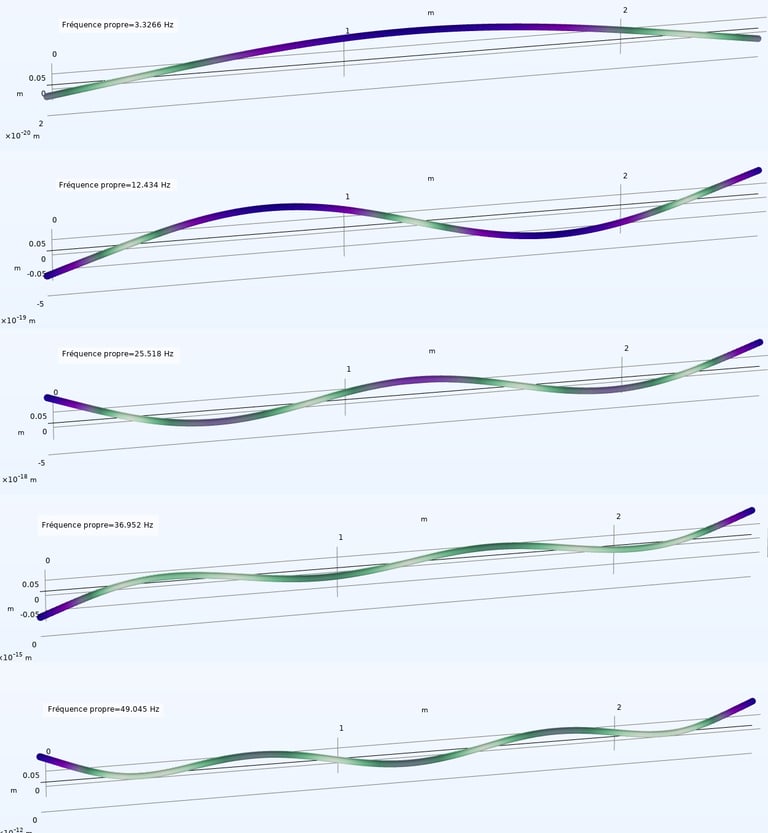
Avec une densité de 7850 kg/m³, un coefficient de Poisson de 0,3 et un module d'Young de 210 GPa, une masse ponctuelle au droit des capteurs de 79g, les fréquences propres obtenues sont les suivantes : 3,33 Hz, 12,43 Hz, 25,52 Hz, 36,95 Hz et 49,05 Hz. L'accord avec les données expérimentales est très satisfaisant, avec un écart d’environ ±0.25 Hz jusqu'à 25 Hz et ±1 Hz au delà.
Les modes propres correspondants à chacune de ces fréquences sont présentés ci-dessous, et serviront de référence pour la comparaison avec les résultats expérimentaux fournis par l’ADE.
J’ai prévu de consacrer un petit article à part entière au fonctionnement de cette méthode. Pour ma part je ne la connaissais pas avant d’avoir besoin de dépouiller ces résultats. Mais c’est une méthode simple et élégante — et surtout, très adapté aux essais où l'excitation n'est pas contrôlée.
Analyse des résultats modaux
Nous avons vu que l’analyse fréquentielle réalisée a permis d’identifier six modes propres, dont les cinq premiers sont situés entre 3,5 Hz et 52 Hz, et un sixième mode bien plus élevé à 274,6 Hz. Ces fréquences sont cohérentes avec le comportement attendu d’un système de type « poutre simplement appuyée », ou plus généralement d’un système linéaire vibrant dominé par la flexion.
Les fréquences mesurées suivent une progression approximativement quadratique, caractéristique des modes de flexion successifs. Des écarts vis-à-vis de la théorie idéale sont attendus, compte tenu des conditions aux limites réelles, des masses localisées, de l’amortissement et de la méthode d’excitation. Le saut de fréquence observé entre le cinquième et le sixième mode peut s’interpréter comme l’apparition d’un mode de torsion ou d’un mode local fortement raidi, dont la dynamique est très différente des premiers modes de flexion.
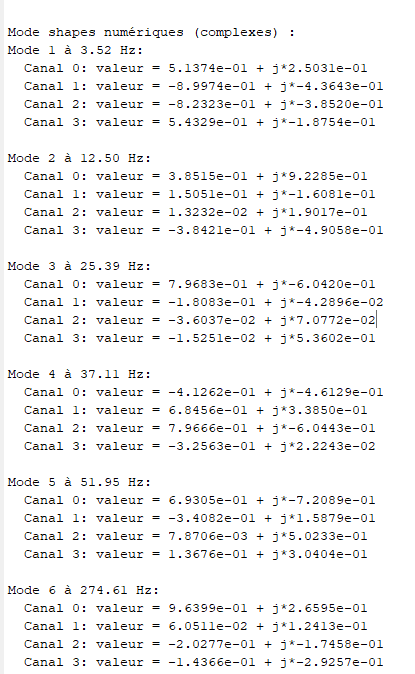
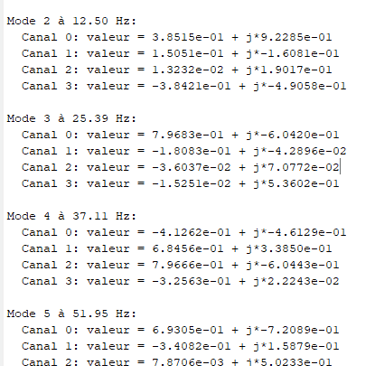
Les vecteurs modaux obtenus sont complexes, ce qui est habituel en analyse modale expérimentale. La partie imaginaire traduit à la fois la phase relative entre les canaux de mesure et l’effet de l’amortissement dans le système. Cette représentation complexe permet de capturer fidèlement l’information dynamique et de reconstruire la déformée complète de chaque mode.
D'ailleurs l’analyse de ces vecteurs modaux confirme la cohérence des résultats :
Le premier mode présente une déformée typique avec un maximum centré et un mouvement globalement en phase.
Le deuxième mode montre une symétrie centrale, comme attendu pour un mode pair avec un nœud au milieu de la poutre.
Le troisième mode, peu excité, reste faiblement visible dans les mesures, ce qui s’explique car l’excitation est placée à proximité d'un des nœuds à ce mode.
Le quatrième mode confirme de nouveau une symétrie centrale dans les amplitudes, en accord avec la nature du mode.
Une confirmation expérimentale particulièrement intéressante concerne la qualité de la synchronisation entre les voies de mesure. Dans les modes symétriques, on observe que les déphasages entre paires de capteurs placés de manière symétrique (notamment les canaux 0 et 3, ou 1 et 2 pour les modes 2 et 4) sont faibles. Cela témoigne d’une excellente synchronisation temporelle entre les voies. La faible dispersion de phase observée indique que le glissement résiduel associé à la résolution temporelle de notre synchronisation est faible. Ce résultat confirme la robustesse de l’acquisition multi-voies en mode embarqué, et constitue un point extrêmement positif du point de vue métrologique.
L’ensemble des résultats valide ainsi le très bon fonctionnement de la chaîne d’acquisition embarquée et la capacité à extraire des formes modales pertinentes avec des moyens low-cost radio-synchronisés. Pour être honnête, je ne m'attendais d'ailleurs pas à ce que cela fonctionne aussi bien et à rencontrer un accord entre expérience et modèle aussi satisfaisant : la comparaison entre les formes obtenues et les modes théoriques d’une poutre vibrante est une confirmation supplémentaire de la pertinence de l’approche.
Innovation
Systèmes embarqués, intelligence artificielle, deep learning, solutions sur mesure, efficacité, innovation, sécurité, fiabilité.
Contact
© 2025. All rights reserved.
© 2025. Tous droits réservés.